|
Yan Weilong (闫威龙) I am a Ph.D. student majoring in Electrical and Computer Engineering (ECE) at National University of Singapore (NUS), supervised by Prof. Robby T. Tan. Before that, I received my bachelor degree from Yingcai Honors College, in University of Electronic Science and Technology of China (UESTC), majoring in Electronic Information Engineering and supervised by Prof. Liu Shuaicheng and Prof. Cheng Hong. I have research interests in robotics and computer vision. My current research focuses on 3D/4D vision and multimodal learning/understanding. Feel free to contact me! Email: 1092443660ywl@gmail.com |

|
News
|
[May. 2026] One paper is accepted by ICML 2026! [Feb. 2026] Two papers are accepted by CVPR 2026! [Jun. 2025] "PVChat: Personalized Video Chat with One-Shot Learning" is accepted by ICCV 2025! [Feb. 2025] "Synthetic-to-Real Self-supervised Robust Depth Estimation via Learning with Motion and Structure Priors" is accepted by CVPR 2025! [Jul. 2023] "Deep Homography Mixture for Single Image Rolling Shutter Correction" is accepted by ICCV 2023! [Jan. 2023] "Event-Triggered Learning Robust Tracking Control of Robotic Systems With Unknown Uncertainties" is accepted by TCAS-II! |
Preprints
|
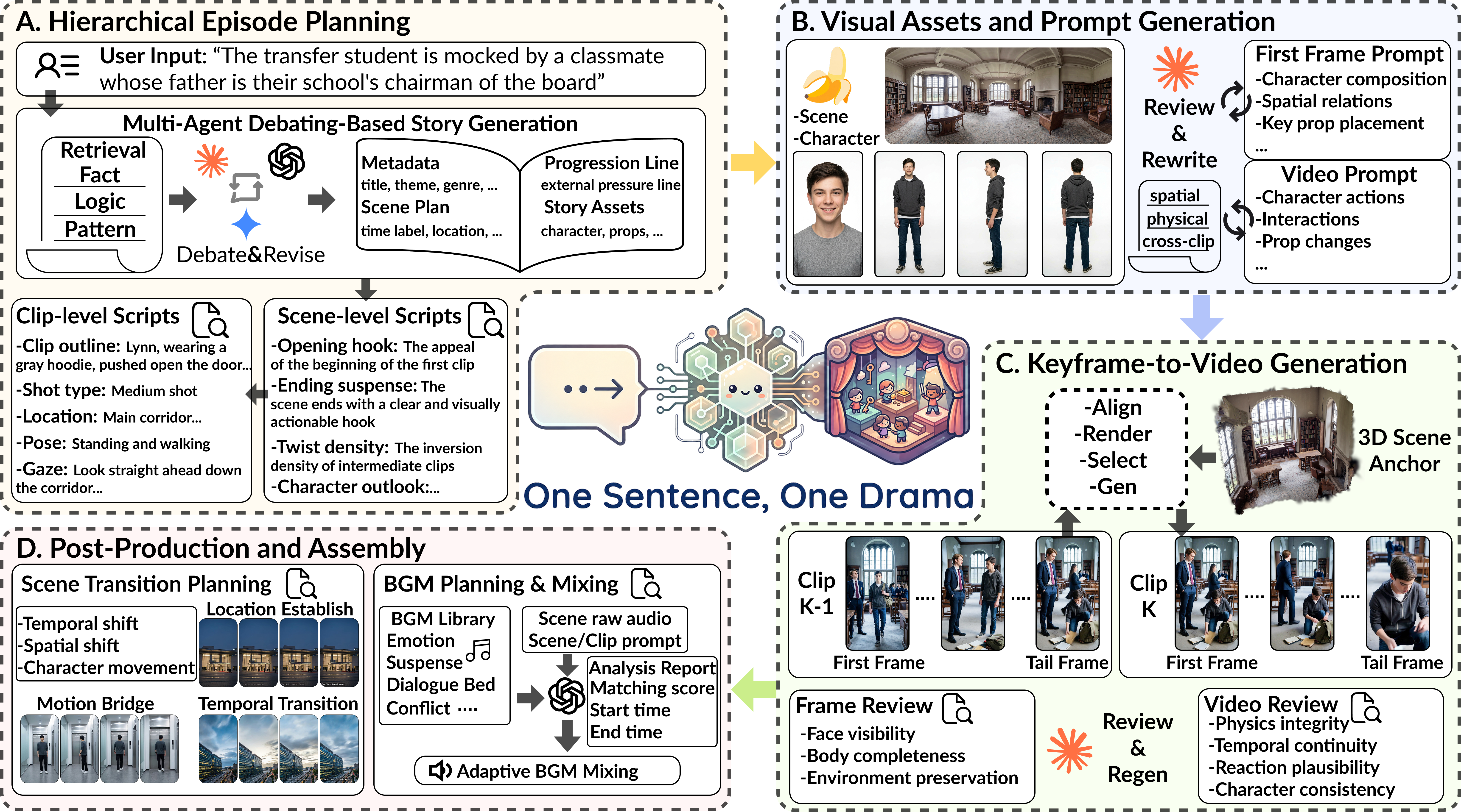
One Sentence, One Drama: Personalized Short-Form Drama Generation via Multi-Agent Systems Yufei Shi*, Weilong Yan*, Naixuan Huang, Yucheng Chen, Chenyu Zhang, Tao He, Si Yong Yeo, Ming Li arxiv, 2026 PDF / Code A multi-agent system that focuses on a single sentence to short-drama generation with pacing, narrative coherence, and 3D consistency. |
Publications
|
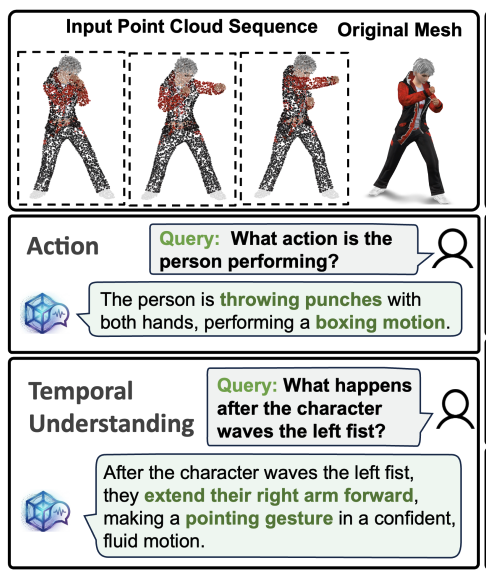
4DPC^2hat: Towards Dynamic Point Cloud Understanding with Failure-Aware Bootstrapping Xindan Zhang, Weilong Yan, Yufei Shi, Xuerui Qiu, Tao He, Ying Li, Ming Li, Hehe Fan ICML, 2026 PDF / Code The first framework that makes the MLLMs aware of the dynamic point cloud sequences. |
|
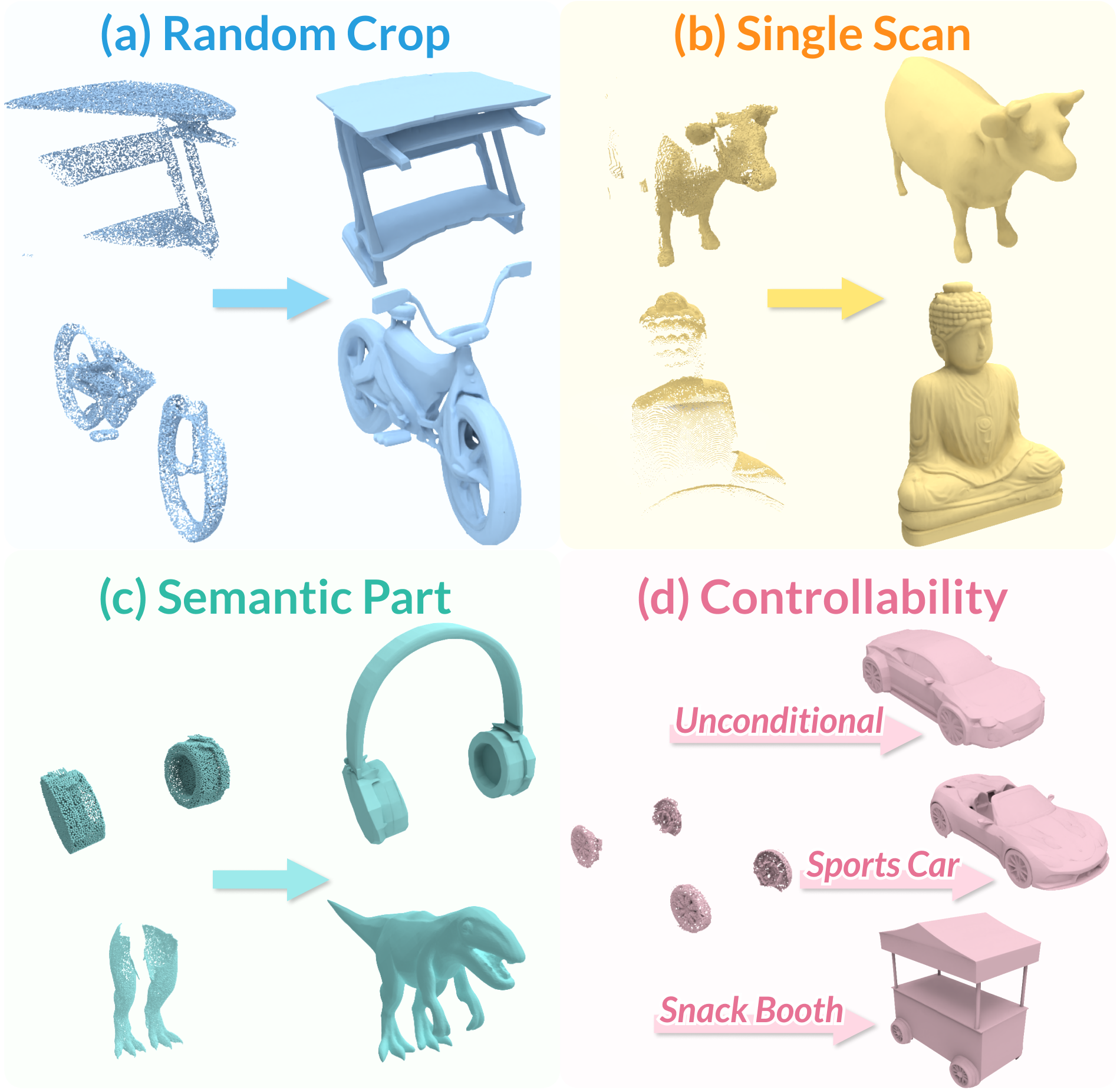
LaS-Comp: Zero-shot 3D Completion with Latent–Spatial Consistency Weilong Yan, Haipeng Li, Hao Xu, Nianjin Ye, Yihao Ai, Shuaicheng Liu, Jingyu Hu CVPR, 2026 PDF / Code A framework that studies to unleash the power of 3D generative foundation model for zero-shot real-world 3D completion. |
|
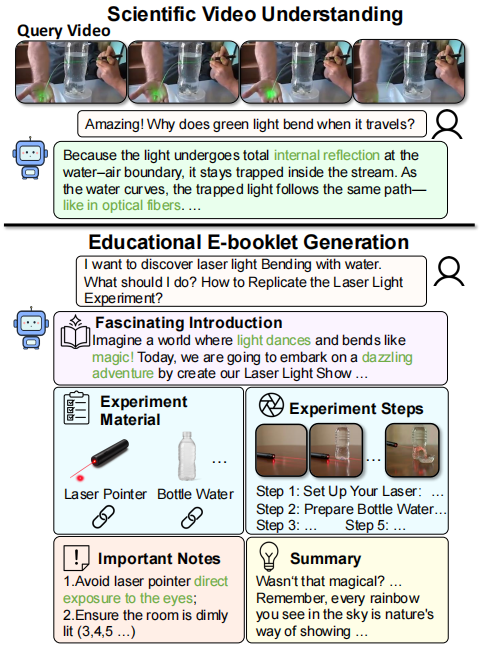
SciEducator: Scientific Video Understanding and Educating via Deming-Cycle Multi-Agent System Zhiyu Xu, Weilong Yan, Yufei Shi, Xin Meng, Tao He, Huiping Zhuang, Ming Li, Hehe Fan CVPR, 2026 PDF / Code The first multi-agent system for scientific video understanding and education. |
|
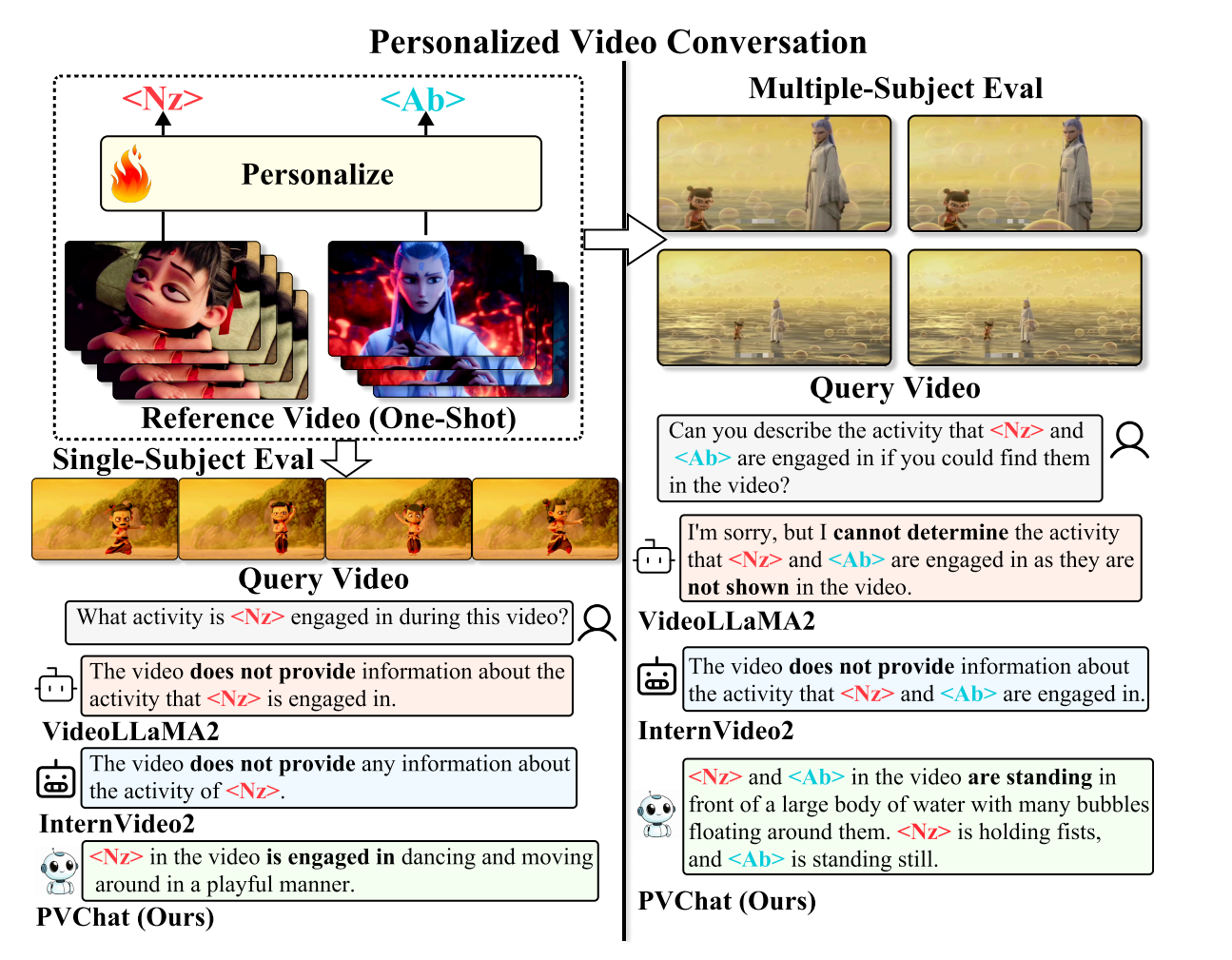
PVChat: Personalized Video Chat with One-Shot Learning Yufei Shi*, Weilong Yan*, Gang Xu, Yumeng Li, Yuchen Li, Zhenxi Li, Fei Richard Yu, Ming Li, Si Yong Yeo ICCV, 2025 PDF / Code The first personalized ViLLM that enables subject-aware question answering (QA) from a single video for each subject. |
|
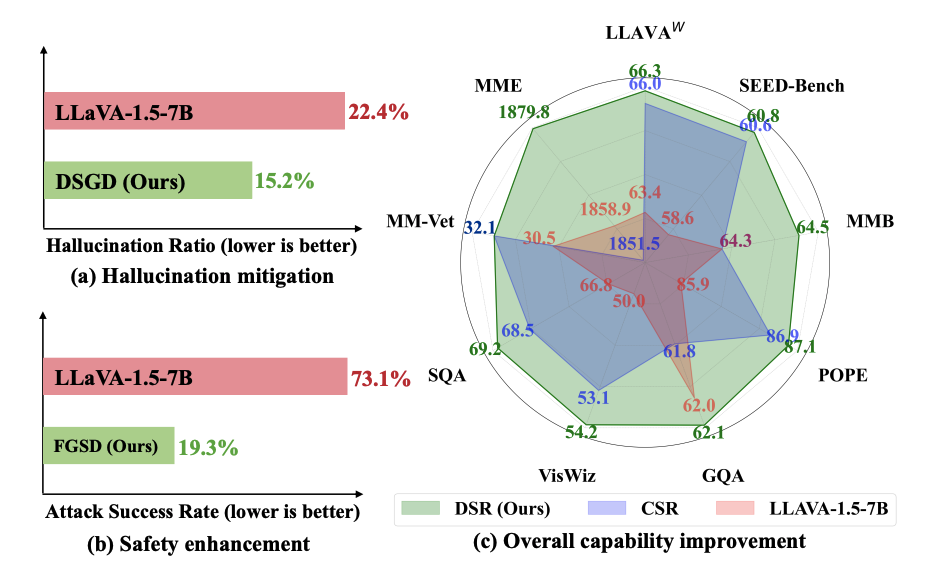
Improving Alignment in LVLMs with Debiased Self-Judgment Sihan Yang, Chenhang Cui, Zihao Zhao, Yiyang Zhou, Weilong Yan, Ying Wei, Huaxiu Yao EMNLP Findings, 2025 PDF / Code A framework that enables the model to autonomously improve alignment. |
|
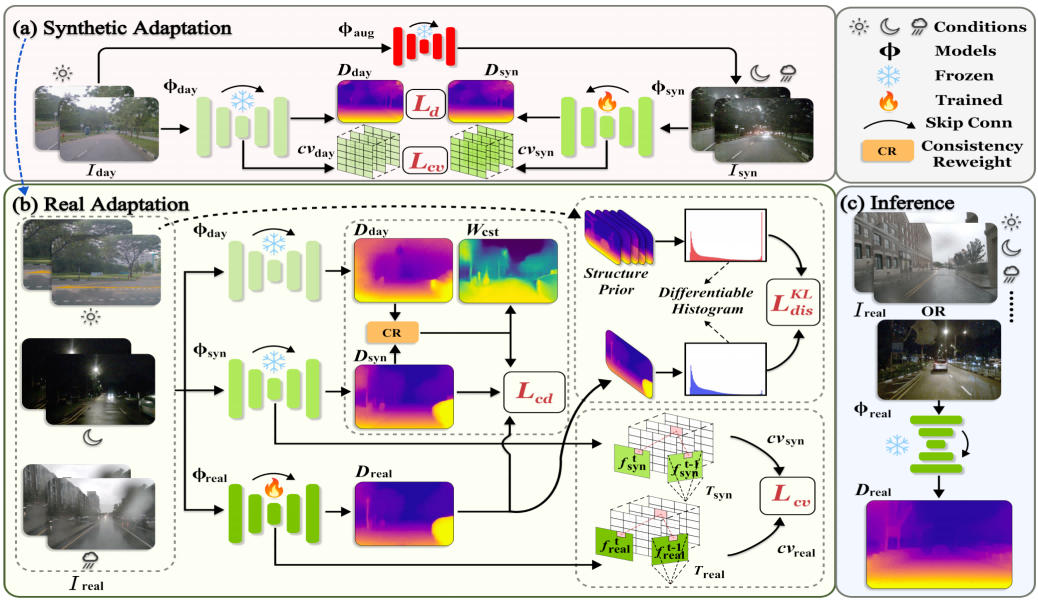
Synthetic-to-Real Self-supervised Robust Depth Estimation via Learning with Motion and Structure Priors Weilong Yan, Ming Li, Haipeng Li, Shuwei Shao, Robby T. Tan CVPR, 2025 PDF / Code A synthetic-to-real self-supervised depth estimation method leveraging motion and scene priors, from daytime to adverse conditions. |
|
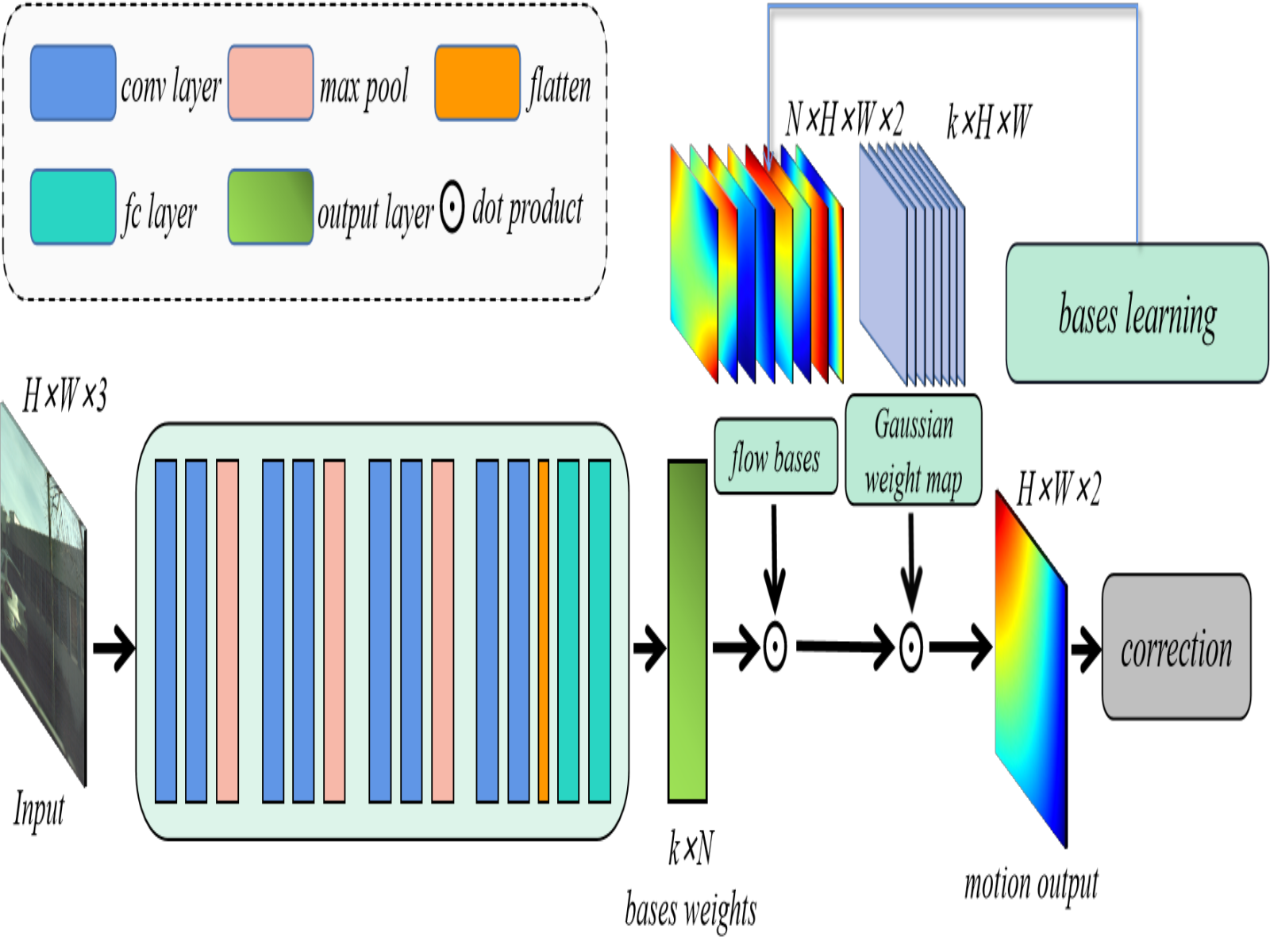
Deep Homography Mixture for Single Image Rolling Shutter Correction Weilong Yan, Robby T. Tan, Bing Zeng, Shuaicheng Liu ICCV, 2023 PDF / Code We propose a deep homography mixture model using learned motion bases from natural video data to correct rolling shutter distortion. |
|
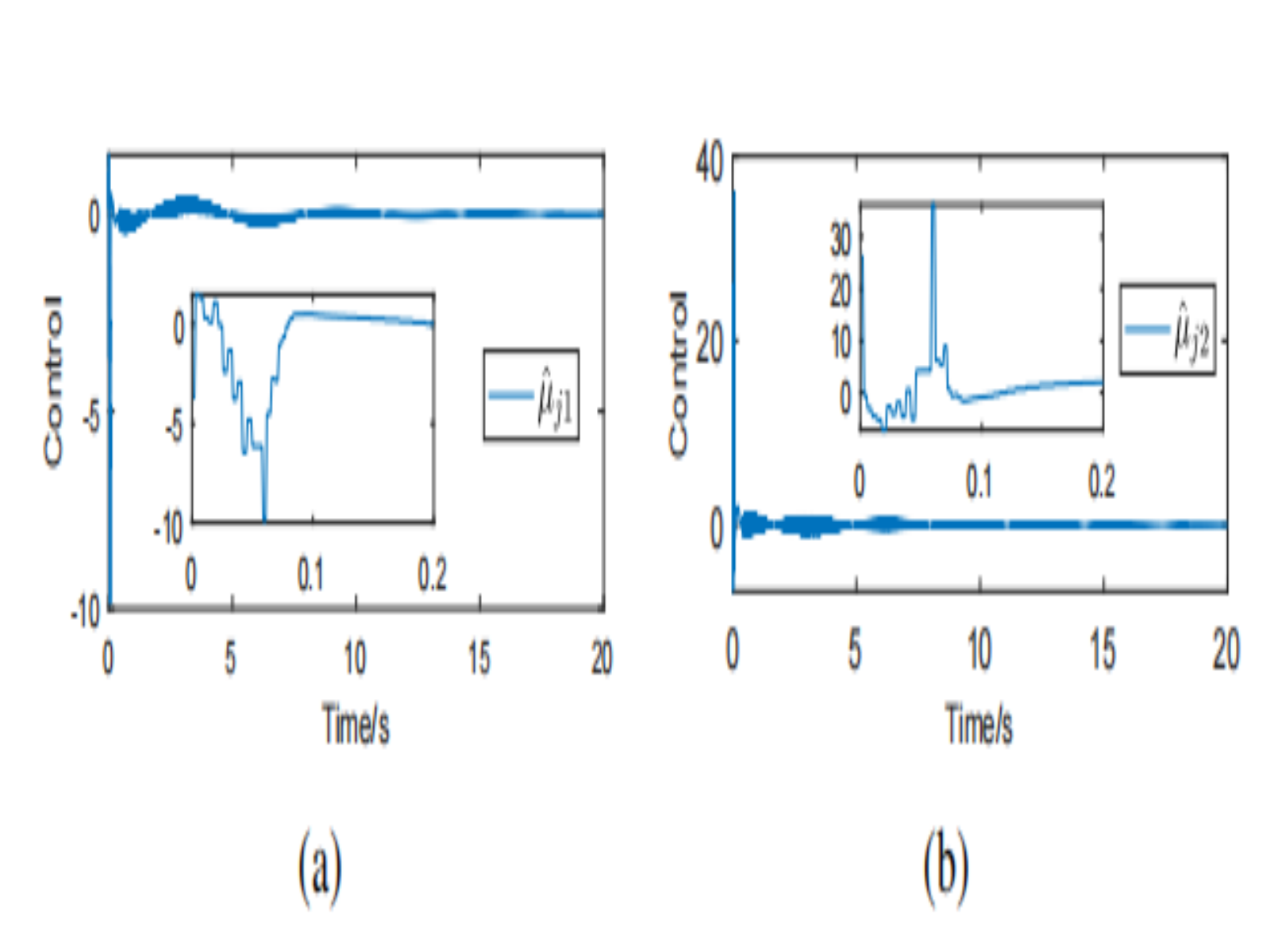
Event-Triggered Learning Robust Tracking Control of Robotic Systems With Unknown Uncertainties Zhinan Peng, Weilong Yan, Rui Huang, Hong Cheng, Kaibo Shi, Bijoy Kumar Ghosh IEEE TCAS-II, 2023 This work addresses tracking control of robotic systems with unmatched uncertainty using adaptive dynamic planning (ADP). |
Academic Services
|
Serve as a regular reviewer for conferences including CVPR, ICLR, NIPS, ICCV, ECCV, AAAI, ICRA, IROS. Serve as a regular reviewer for journals including TPAMI, TMM, TCSVT, TBD, RAL, TMLR. Serve as a graduate assistant for EE2211 (2024, 2025, 2026), EE5201 (2024). |
|
Template from Jon Barron's website. |